工程流体力学
Fluid Mechanics
先导
分数构成
研讨 20
研讨报告
≥1000 字
越详细,越深越好
查阅文献
期末 80
老师
软件
ANSYS
Fluit
论文期刊
AIAA 美国航空航天学会
休息
11:30
17:00
如何学习
读书
教材
参考书
复习
认真做习题
2
1,2,3,4,6,13,14
3
2,4,5,7,10,14,16,18,20,22,24,27
4
2,4,6,7,9,11,24,28,29,30
5
2,4,5,7,10,13,14
注重概念积累
正文
绪论
它以
流体力学内容包括流体静力学、流体运动学、流体动力学。
流体力学
流体力学涵义
它以流体为研究对象,是研究
流体力学研究任务
研究流体所遵循的宏观运动规律以及流体和物体之间的相互作用
地位
是一门重要的专业
流体力学是力学的一个重要分支。
伟人
中国
钱学森、周培源、吴仲华
外国
阿基米德、达芬奇、伽利略、托里拆利、牛顿、伯努利、欧拉、拉格朗日、亥姆霍兹、纳维、斯托克斯、雷诺、卡门
研究内容
流体静力学 Fluid statics
外力作用下的流体平衡的条件和压强分布
流体运动学 Fluid Kinematics
几何观点
流体运动学研究在给定条件下流体运动的特征和规律,但不涉及运动发生和变化的原因;
流体运动学 Fluid Dynamics
力学观点
流体动力学研究在外力作用下流体的运动规律,以及流体与固体间的相互作用。
我们学习 1-9 章
研究方法
理论分析
实验研究
数值计算
*Fluid and its properties 流体及其物理性质**
流体
流体顾名思义,具有流动性
力学解释
在任何微小的剪切力的作用下能够发生连续变形的物质称为流体
流体与固体最本质的区别:
二者承受剪应力和产生剪切变形能力生的不同
分类
气体
液体
自由表面
当液体和气体接触时,液体和气体间的交界面称为液体的自由表面
易流动性
定义:
流体在静止时不能承受剪力,抵抗剪切变形的性质
流体不能承受拉力,能承受压力
连续介质模型
从微观角度看,流体并不是连续分布的物质。
但是,流体力学并不研究微观的分子运动,而只研究流体的宏观机械运动
流体质点(流体微团)
连续介质 Continuum
这就是说,可以不去考虑分子间存在的空隙,而把
意义
既然在流体力学中把流体作为连续介质来处理,那么表征流体属性的密度、速度、压强、温度等物理量一般在空间也应该是连续分布的。
由此可以认为:除个别情况外,对于流体的连续流动,表征流体属性的各种物理量应该是空间和时间的单值连续可微函数,这样就有可能利用微分方程等数学工具去研究流体的平衡和运动的规律了。
作用在流体上的力
表面力
作用在所取
这种力通常指的是分离体以外的流体通过接触面作用在分离体上的力。
应力,(单位面积上的表面力)
与接触面积成正比
分法向应力和切向应力
切应力
流体相对运动时因粘性内摩擦产生的
表面张力
在液体与异相
它是一种特殊类型的表面力,它主要是由液体内的分子对处于表面层的分子的吸引而产生的
作用在流体自由表面沿作用面法线方向的拉力
质量力(体积力)
名称来源
处于某种力场中的
质量力即某种力场作用在
和流体的质量成正比
当应用达朗伯($J.Le.R.D'AIembert$)原理去研究流体的加速运动时,虚加在流体质点上的惯性力也属于质量力
在直线加速运动中只有沿直线的惯性力
在一般曲线运动中则有切向惯性力和离心惯性力
在相对运动中,当牵连运动为转动时,还可能有柯氏惯性力
举例
重力场中地球对流体全部质点的引力作用所产生的重力
磁力场和电力场对磁性物质和带电物质所产生的磁力和电动力等
单位质量力
涵义
单位质量的流体所受的质量力
单位
加速度单位

特点
作用在流体体积上,随空间位置和时间变化
流体的主要物理性质(属性)
1. 流体的密度 Density
流体的重要属性之一
表征流体在空间某点质量的密集程度
单位
$\mathrm{kg} / \mathrm{m}^{3}$
表达式
$\rho=\frac{m}{V}$
$m$为流体的质量; $V$为流体的体积
2. 流体的相对密度 Relative Density
定义
某种流体的密度$\rho _{f}$与 4$^{\circ} C$时水的密度$\rho_{w}$的比值
符号 $d$
3. 流体的比体积
工程热力学所学
密度倒数
4. 混合气体的密度
$$\rho=\rho_{1} \alpha _{1}+\rho_{2} \alpha_{2} + \cdots = \sum_{i=1}^{n} \rho_{i} \alpha_{i}$$

流体的压缩性与膨胀性
1. 流体的膨胀性
体积膨胀系数
单位
$$1/K\\1/^{\circ} C$$
单位温升所引起的体积变化率 $\alpha_{V}$
公式
$$\alpha_{V}=\frac{\delta V / V}{\delta T}$$

2. 流体的压缩性
压缩系数 $\kappa$
单位
$m^{2}/N$
单位压强(应力)所引起的体积变化率
公式
$$\kappa=-\frac{\delta V / V}{\delta p}$$

体积模量
压缩系数的倒数
$$K=\frac{1}{\kappa}=-\frac{\delta p}{\delta V / V}$$
工程上常用体积模量去衡量流体压缩性的大小。显然,$K$值大的流体的压缩性小,$K $值小的流体的压缩性大。
K的单位与压强相同,为$Pa$ 与应力相同
我的理解
$$\frac{体积应变}{应力}$$
水的$K$很大,通常取$K=2.0 ~GPa$
一般情况下,需要同时考虑压强和温度对气体体积和密度变化的影响
完全气体(热力学中的理想气体)的状态方程
$$p v=R T \\p / \rho=R T$$

可压流体和不可压流体
任何流体都是可以压缩的
在工程实际问题中是否考虑流体的压缩性,要视具体情况而定
通常把液体视为不可压缩流体,即忽略在一般工程中没有多大影响的微小的体积变化,而把液体的密度视为常量。
这样处理问题,可使工程计算大为简化。
但是,在水击现象、水下爆炸等问题中,都是把水作为可压缩流体来处理的。因为水的压缩性虽然很小,但在这类问题中却是不能忽视的。
通常把气体作为可压缩流体来处理,特别是在流速较高、压强变化较大的场合,它们的体积变化是不容忽视的,必须把它们的密度视为变量。
但是,在流速不高、压强变化较小的场合,使可忽略压缩性的影响,把气体视为不可压缩流体。
例如,在标准状态下,当空气的流速等< 102m/s时,不考虑乐缩性所引起的计算值相对误差约等于2.3%(详见第七章第一节),这在工程计算中一般是可以忽略不计的。
这样,对不可压缩流体得出的各种运动规律便可直接应用到这类气体的流动研究中。
把烟气当做不可压缩流体来处理。
流体的粘性
壁面不滑移条件
牛顿内摩擦定律(牛顿切向应力公式)
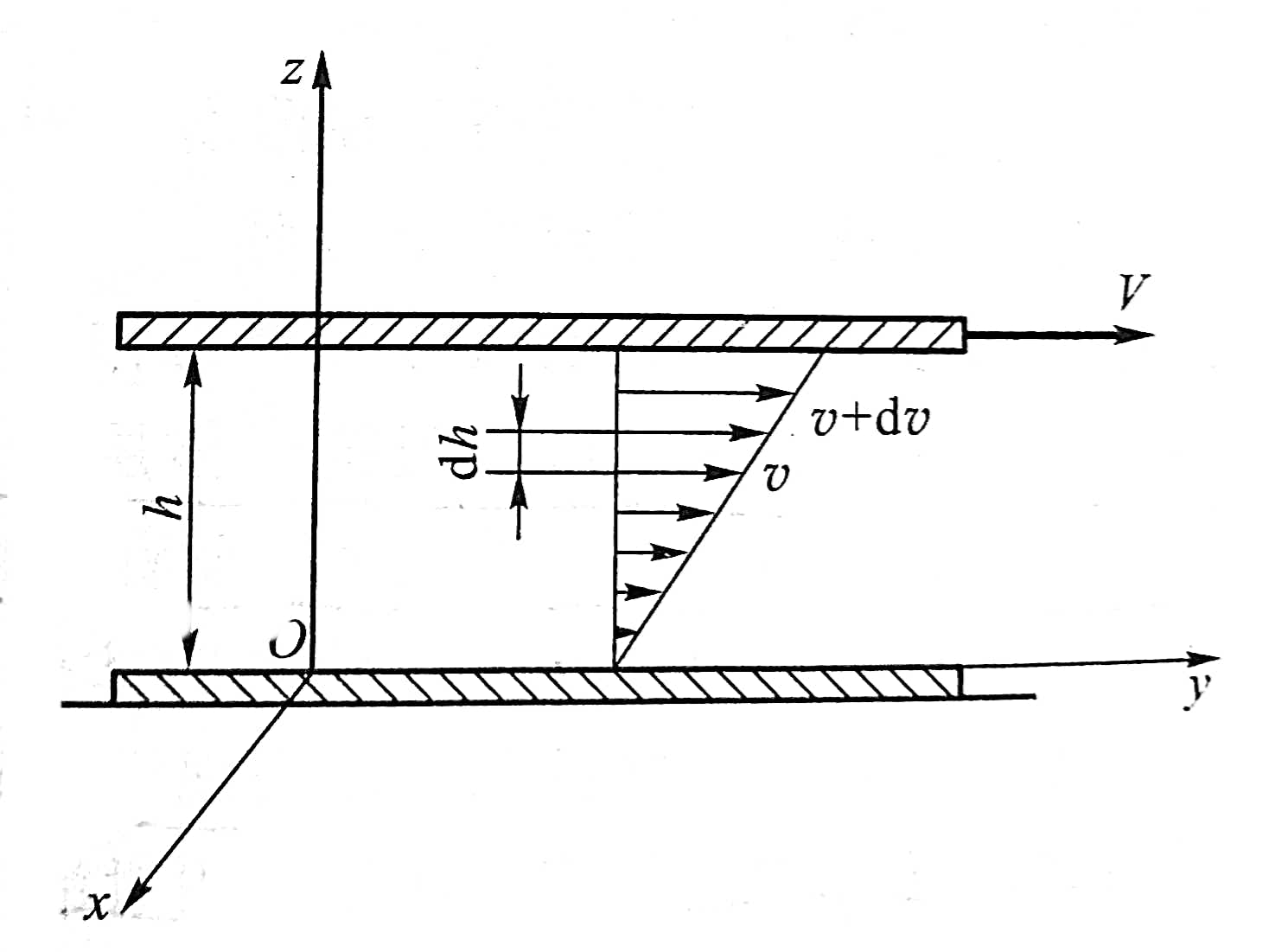
$$F_{\mathrm{f}}=\mu A \frac{\mathrm{d} v}{\mathrm{~d} h}$$
$$\tau= \pm\mu \frac{\mathrm{d} v}{\mathrm{~d} h}$$
式中
$F_{f} 内摩擦力 N$
$A ~接触面积m^{2}$
$\frac{\mathrm{d} v}{\mathrm{~d} h} 速度梯度 $
$\mu与流体性质有关的参数$,称动力参数(或粘度系数),$Pa \cdot s$
粘性
流体的粘性通常用粘度来度量
分类
动力粘度 $$\mathbf{\mu}$$
注意记忆,汉字“力”与 $$\mu$$很像嘛
名称
其量纲中存在动力学因素
别称
绝对粘度,简称粘度
直接来自牛顿内摩擦定律(牛顿切向应力公式)
$$\mu=\frac{\tau}{\mathrm{d} v/\mathrm{d} h}$$
物理意义
$\mu$表示单位梯度时内摩擦切应力的大小
单位
国际单位制 $$\mathrm{SI}$$ ,$$Pa \cdot s$$
物理单位制 $CGS$,$dyn \cdot s/cm^2$,称为泊,记为$P$
计算中常用泊的百分之一来度量,称为厘泊,记为$cP$
换算关系
$1 \mathrm{P}=100 \mathrm{~cP}=10^{-1} \mathrm{~Pa} \cdot \mathrm{s}$
运动粘度 $\nu$
名称来源
量纲中仅有运动性因素
$$\nu=\frac{\mu}{\rho}$$
没有明确的物理意义
引入原因
只是因为在理论分析和工程计算中,常常出现$\mu$与$\rho$比值
引入$\nu$可以使其分析、计算简便而已
单位
$SI$,$m^2/s$
$CGS$,$cm^2/s$,称为斯托克斯,简称斯,记为$St$,常用斯的百分之几作为计量单位,称为厘斯,记为$cSt$
相对粘度
原因
动力粘度,运动粘度难以直接测量,而流体的粘性又是必须掌握的重要属性
用对比法测量流体的粘度,通常称为相对粘度,又称为条件粘度
我国使用恩氏粘度,代号为$^{\circ}E$
换算关系的经验公式
压强对流体粘性的影响
温度对流体粘性的影响
温度升高,气体的粘度将随之增大,液体的粘度将显著减小
气体粘度与温度有关的经验公式
理想
一切流体都有粘性,粘性本身是十分复杂的问题
人们提出一种理想的没有粘性的流体,称为理想流体
只是一种假设的物理模型
意义
理想流体的引入是流体力学发展的关键性步骤
在实际流体运动规律的研究中,人们首先按理想流体来进行理论分析和数学推导,的出基本规律,而粘性对流动规律的影响将主要通过实验加以修正
牛顿流体和非牛顿流体
牛顿流体
服从牛顿内摩擦定律的流体
本书所研究的仅限于牛顿流体
液体的表面性质
表面张力
毛细现象
流体静力学 Fluid statics
引入
通常把地球选作惯性参考坐标系。
当流体相对于惯性参考坐标系没有运动时,称流体处于静止(或平衡)状态。
当流体相对于某非惯性参考坐标系没有运动,而相对于惯性参考坐标系有运动时,称流体处于相对静止(或相对平衡)状态。
流体处于静止或相对静止状态时,切向应力等于零,流体不呈现黏性,作用在流体上的表面力只有静压强。
流体静力学得出的结论对理想流体和黏性流体均适用。
1. 流体的
特性
静压强方向与作用面的内法线方向一致
作用于同一点上的各方向的
2. 流体平衡微分方程(欧拉平衡微分方程)
公式
$$f_{x}-\frac{1}{\rho} \frac{\partial p}{\partial x}=0 \\f_{y}-\frac{1}{\rho} \frac{\partial p}{\partial y}=0 \\f_{z}-\frac{1}{\rho} \frac{\partial p}{\partial z}=0$$
流体静力学最基本的方程组
适用范围
不可压缩
物理意义
在静止的
势函数、有势力、有势质量力
等压面
定义
在充满平衡流体的空间,连接压强相等的各点所组成的面
特性
等压面就是等势面
在平衡的流体中,通过每一质点的等压面必与该点所受的质量力相垂直
两种互不想混的流体,当他们处于平衡状态时,其分界面必为等压面
重力场流体平衡基本方程式
公式
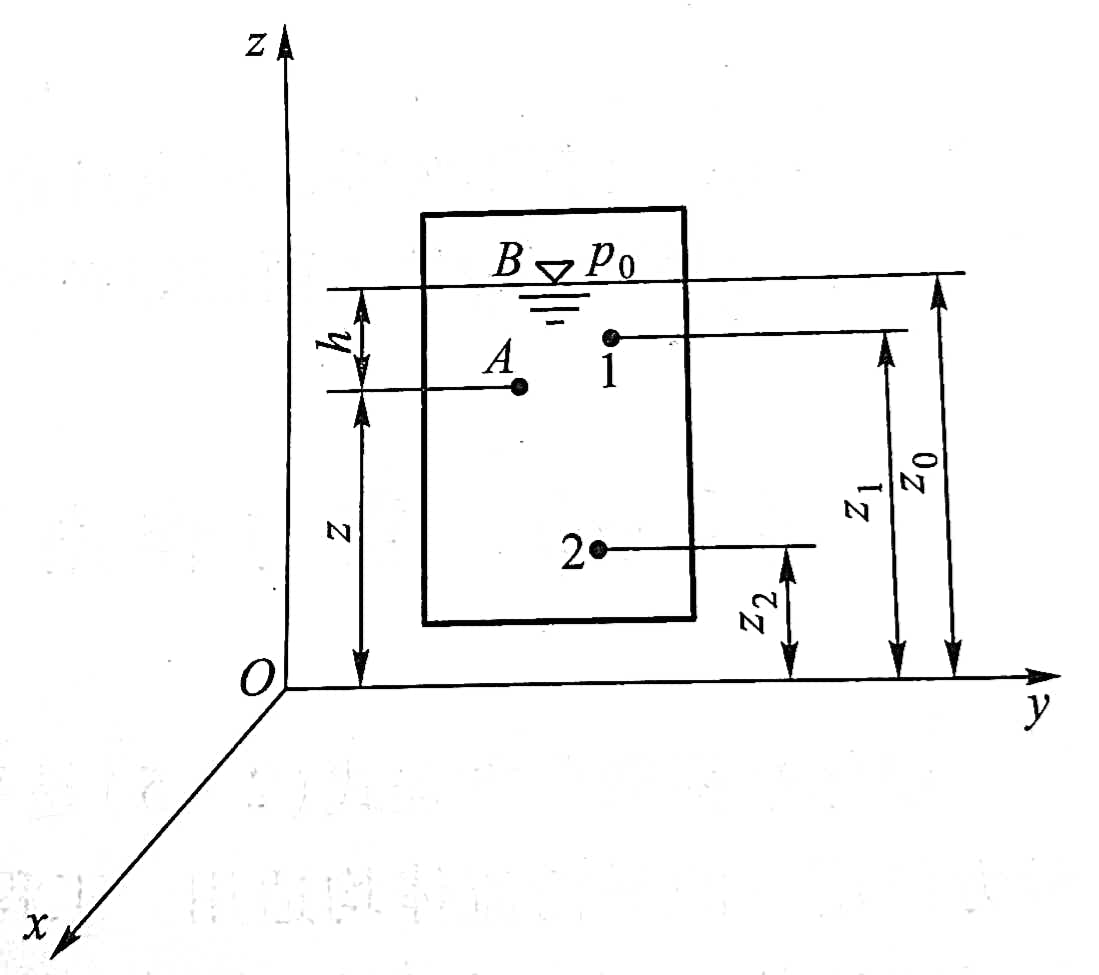
$$\mathrm{d}p=-\rho g \mathrm{d} z$$
$$\rho g \mathrm{d} z+\mathrm{d}p=0$$
$$\mathrm{d}(\rho g \mathrm{d}z +p)=0$$
$$\rho g z +p=C$$
$$z_{1}+\frac{p_{1}}{\rho g}=z_{2}+\frac{p_{2}}{\rho g}$$
$$p=p_0 +\rho g (z_1-z_2)$$
$$p=p_0+\rho g h$$
$h$称为淹深
几何意义
水头
$z$位置水头
$\frac{p}{\gamma}$压强水头
静水头
上面两个和
在重力作用下的连续均质不可压缩静止流体中,静水头线和计示静水头线均为水平线
物理意义
$z+\frac{p}{\rho g}=C$
$z$位能
$h_{p}=\frac{p}{\rho g}$压力能
在重力作用下的连续均质不可压缩静止流体中,各点单位重量流体的总势能保持不变
液体中任何一点的压力能与位能之和是一常数,即压力能与位能可以相互转换,但其总和保持不变
预备概念
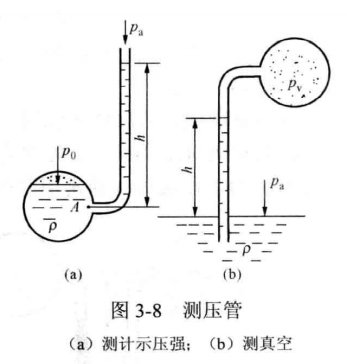
绝对压强$p_{ab}$
以绝对真空为零点开始计量的压强
计示压强$p_m$
以大气压为零计量的压强,记为绝对压强与大气压之差
在开口容器及不可压缩流体的静压强计算问题中,一般都采用表压
真空度$p_v$
流体的绝对压强小于大气压而形成真空的程度
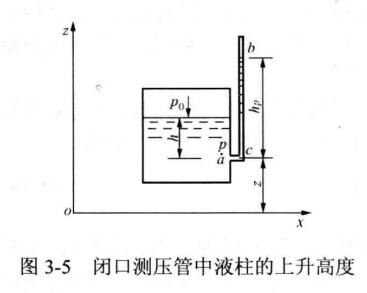
液柱式测压计
1. 测压管
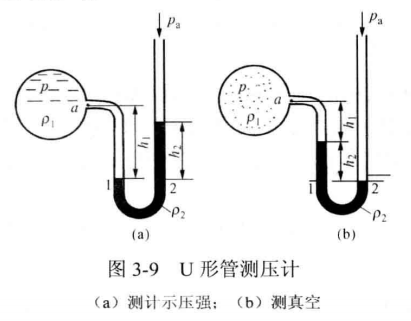
2.U形管测压计
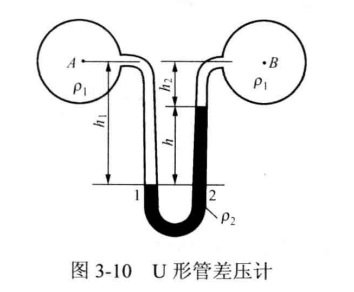
3.U形管压差计
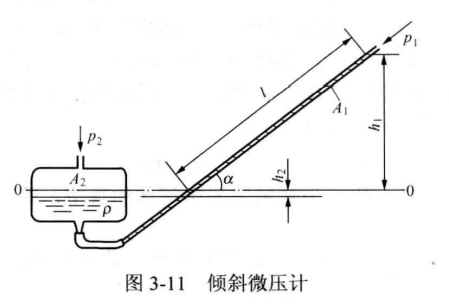
4.倾斜微压计
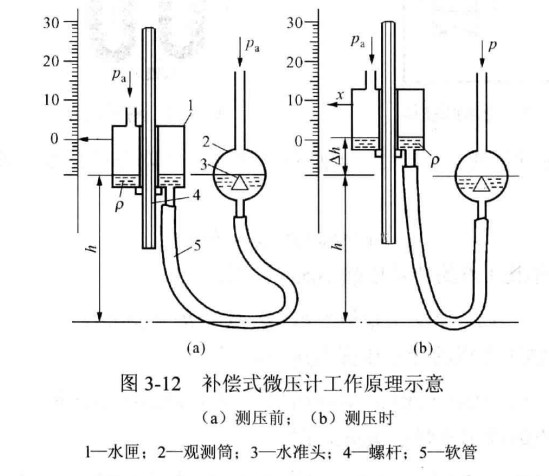
5.补偿式微压计
重力和其他质量力同时作用下流体的平衡
1. 等加速直线运动流体的相对平衡
公式
$$p=p_{0}+\rho[a \cos \alpha \cdot x+(a \sin \alpha-g) z]$$
边界条件
等压面方程
$$\tan \beta=\frac{a \cos \alpha}{g-a \sin \alpha}$$
特殊地,水平方向
$$p=p_0+\rho gh$$
$$\tan \beta=\frac{a}{g}$$
2. 等角速度旋转运动
公式
$$p=p_{0}+\rho g\left(\frac{\omega^{2} r^{2}}{2 g}-z\right)$$
等压面方程
$$\frac{\omega^{2} r^{2}}{2}-g z=C$$
绕铅直轴等角速旋转容器中液体的静压强公式与静止流体中静压强公式完全相同
可以看出,绕铅直轴等角速旋转容器中液体的静压强公式与静止流体中静压强公式 完全相同,即液体中任一点的静压强等于自由液面上的压强加上深度为方、密度为 p的液体所产生的压强。
静止液体作用在平面上的总压力
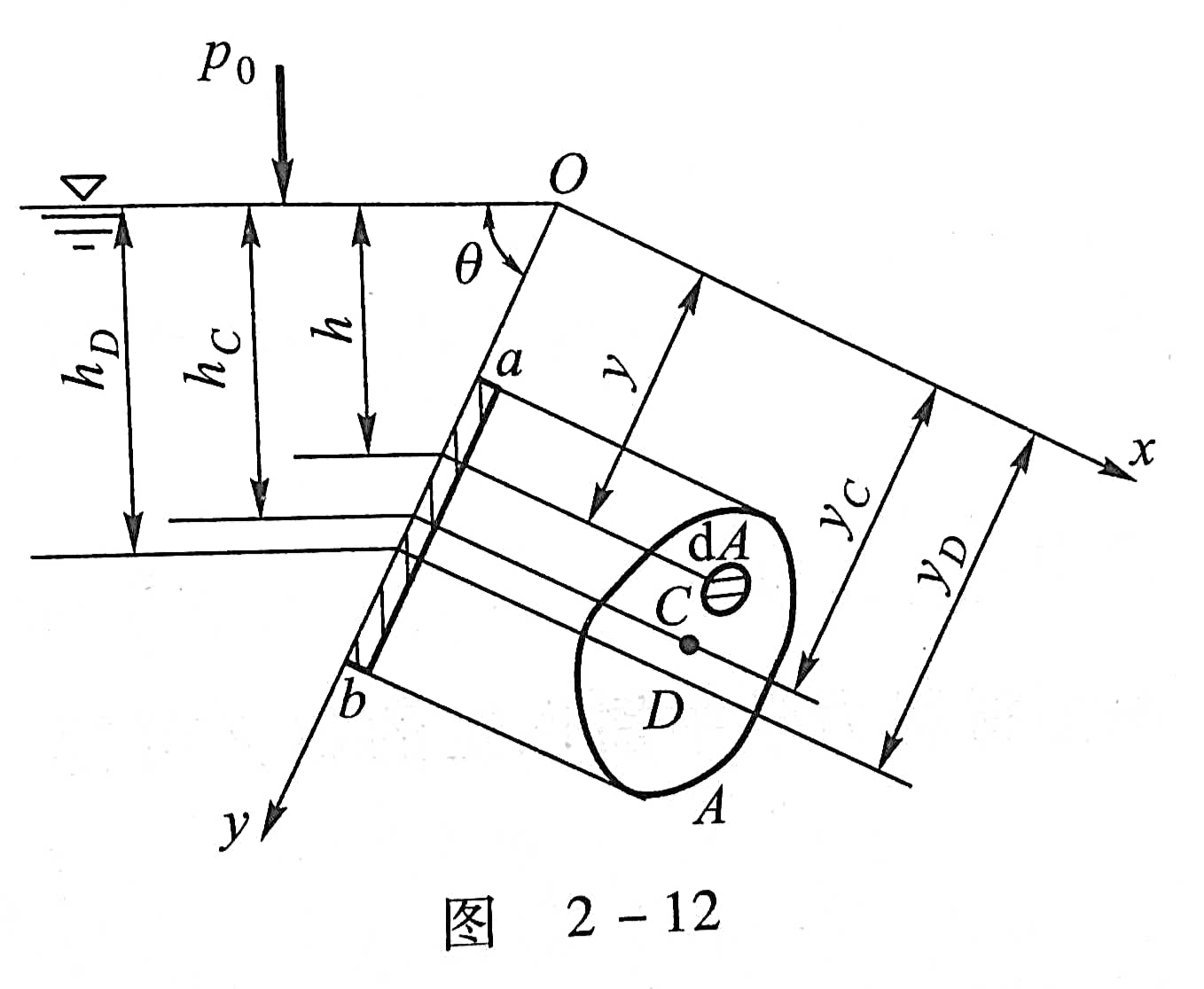
$$F_{p}=p_{0} A+\rho g y_{C} \sin \theta A=\left(p_{0}+\rho g h_{C}\right) A$$
压力中心
$$y_{D}=y_{C}+\frac{I_{C x}}{y_{C} A}$$
工程中遇到的许多平面都是对称的
若平板$ab$在$x$方向不对成,则
$$x_{D}=\frac{I_{C x}}{y_{C} A}$$
式中$I_{xy}$为平板对$x$轴和$y$轴的惯性积
静止液体作用在曲面上的总压力
公式
压力中心
压力体
静正液休作用在潜休和浮体上的浮力
潜体和浮体平衡的稳定
流体运动学和流体动力学基础
引入
流体的运动实际上是大量流体运动的实际组合
流体质点运动的全部空间成为流场
研究流体运动的两种不同方法
1. 拉格朗日法(随体法)
着眼于各个流体质点
跟踪
2. 欧拉法(局部法){r}
着眼于整个流场各空间点处的状态
布哨
$$\begin{array}{l}v_{x}=v_{x}(x, y, z, t) \\v_{y}=v_{y}(x, y, z, t) \\v_{z}=v_{z}(x, y, z, t) \\p=p(x, y, z, t) \\\rho=\rho(x, y, z, t) \\T=T(x, y, z, t)\end{array}$$
$$\begin{array}{l}a_{x}=\frac{\partial v_{x}}{\partial t}+v_{x} \frac{\partial v_{x}}{\partial x}+v_{y} \frac{\partial v_{x}}{\partial y}+v_{z} \frac{\partial v_{x}}{\partial z} \\a_{y}=\frac{\partial v_{y}}{\partial t}+v_{x} \frac{\partial v_{y}}{\partial x}+v_{y} \frac{\partial v_{y}}{\partial y}+v_{z} \frac{\partial v_{y}}{\partial z} \\a_{z}=\frac{\partial v_{z}}{\partial t}+v_{x} \frac{\partial v_{z}}{\partial x}+v_{y} \frac{\partial v_{z}}{\partial y}+v_{z} \frac{\partial v_{z}}{\partial z}\end{array}$$
向量表示式
$$\boldsymbol{a}=\frac{\partial v}{\partial t}+(\boldsymbol{v} \cdot \boldsymbol{\nabla}) v$$
哈密顿算子
$$\boldsymbol{\nabla}=\frac{\partial}{\partial x} \boldsymbol{i}+\frac{\partial}{\partial y} \boldsymbol{j}+\frac{\partial}{\partial z} \boldsymbol{k}$$
当地加速度(时变加速度)
右边第一项
迁移加速度(位变加速度)
右边二三四项
质点导数(随体导数)
两部分之和即为流体质点得全加速度
欧拉法研究的是流场中每一固定空间点上的流动参数的分布及随时间的变化规律。
欧拉法研究一般给不出流体个别质点的运动踪迹, 看不出每个流体质点的过去和未来。
然而, 欧拉法给出了某瞬时整个流场的运动参数分布,因而可以用连续函数理论对流场进行有效的理论分析和计算。
实际上,在大多数的工程实际问题中,通常并不需要知道每个流体质点自始至终的运动过程,而只需要知道流体质点在通过空间任意固定点时运动要素随时间的变化状况,以及某一时刻流场中各空间固定点上流体质点的运动要素,然后就可以用数学方法对整个流场进行求解计算
再者,用拉格朗日法移动测试仪器来跟踪测量每个
因此在大多数流体力学理论研究和工程实际问题的研究中,都采用欧拉法
拉格朗日法描述着眼于流体质点,将运动参数看作随体坐标与时间的函数
欧拉法描述着眼于空间点,将运动参数看作空间坐标和时间的函数
但两者都是描述
关于流体运动的一些
恒定流动(定常流动)
流动参量不随时间变化的流动称为定常流动
当地加速度为零
均匀流动
迁移加速度为零
非恒定流动(非定常流动)
流场中运动参数不但随位置改变而改变,而且也随时间而变化,称为非恒定流动
迹线
定义
流体质点运动的轨迹
迹线的研究属拉格朗日法内容
微分方程
$$\frac{\mathrm{d} x}{v_{x}}=\frac{\mathrm{d} y}{v_{y}}=\frac{\mathrm{d} z}{v_{z}}=\mathrm{d} t$$
流线
定义
流线是某瞬时在流场中所做作的一条空间曲线
该瞬时位于曲线上各点的流体质点的速度在该点与曲线相切
流线形象地给出了流场中地运动状态
适用于欧拉法
性质(与电场线、磁感线类似)
在恒定流动(定常流动)中,流线与迹线是同一条曲线,彼此重合

流线不能彼此相交只有在流场内速度为零或为无穷大的那些点,流线可以相交,
因为在这些点上不会出现不同流动方向的问题。
速度为零的点称为驻点,速度为无穷大的点称为奇点。
流线不能突然转折,只能平缓过度(连续可导)
流线的微分方程式
$$\frac{\mathrm{d} x}{v_{x}}=\frac{\mathrm{d} y}{v_{y}}=\frac{\mathrm{d} z}{v_{z}}$$
流线方程
流管
在流场内作本身不是流线又不相交的封闭曲线,通过该曲线上各点的流线所构成的管状表面称为流管
流管内的流束就像在真实的固体管壁中流动
流束
概念
流管内的流体
若在流场中取一非流面的曲面$S$,则过曲面上各点所作流线的总和,称为流束
流束由流管所围成的空间内所有流线所组成
微小流束
所取曲面为一无穷小面积 $\mathrm{d}s$, 则所得流束称为微小流束
微小流束的极限即为流线,也就是微元流束
总流
截面为有限值的流束称为总流
实际工程中,把管内流动和渠道中的流动看成是总的流束,它由无限多微小流束组成
有效截面(过流断面)
在流束或总流中与所有流线都相垂直的横断面
可平面可曲面
湿周
在总流的过流断面上与流体向接触的固体边璧周长称为湿周
水力半径
定义
总流过流断面面积与湿周之比
公式
$$R_{h}=\frac{A}{\chi}$$
当量直径
定义
总流过流断面面积的四倍与湿周之比
公式
$$d_e = \frac{4 A}{\chi}$$
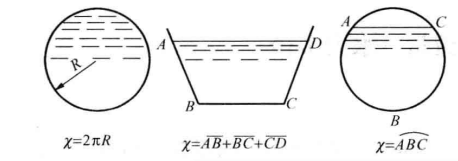
水力半径与圆截面的半径是不同的概念,不能混淆
在非圆截面管道和渠道的水力计算中经常用到湿周和水力半径
流量
定义
单位时间内流过总流过流断面的流体量称为流量
分类
体积流量 $q_V$
流量体用体积表示
$$q_{V}=\iint_{A} \vec{v} \cdot \mathrm{d} \vec{A}=\iint_{A} v \cos (\vec{v}, \vec{n}) \mathrm{d} A$$
单位 $m^3/s$
质量流量 $q_m$
流量体用质量表示
$$q_{m}=\iint_{A} \rho \vec{v} \cdot \mathrm{d} \vec{A}=\iint_{A} \rho v \cos (\vec{v}, \vec{n}) \mathrm{d} A$$
单位 $kg/s$
断面平均流速
若平均流速以$V$标记,则
$$V=\frac{q_{V}}{A}=\frac{\int _A v \mathrm{d}A}{A}$$
断面平均流速的概念十分重要,使研究和计算大卫简化,尤其是在工程计算中,具有十分重要的实际意义
一元流动
二元流动
三元流动
在流体力学的研究和实际工程技术中,在可能的条件下,应尽量将三维流动简化为二维流动甚至为一维流动求解
系统
有限体积的流体质点的集合
最大特点是质量不变
控制体
流场中某一确定的空间区域,这个空间区域称为控制体
空间位置不变
控制面
控制体的周界
输运公式
由来原因
欧拉方法研究的是选定流场(也即控制体)中流动参数的分布与变化。
而物理学的定律和定理,则是按物质系统建立的(拉格朗日法)。
要想将这些定律和定理应用于流体力学,就必须建立系统的物理量随时间的变化率与控制体内这种物理量随时间的变化率和经过控制面的净通量之间的关系,即输运公式。
公式
$$\frac{\mathrm{d} N}{\mathrm{~d} t}=\frac{\partial}{\partial t} \iiint_{C V} \eta \rho \mathrm{d} V+\iint_{C S} \eta \rho v_{n} \mathrm{~d} A$$
$$\frac{\mathrm{d} N}{\mathrm{~d} t}=\frac{\partial}{\partial t} \iiint _{C V} \eta \rho \mathrm{d} V+\iint_{C S} \eta \rho \vec{v} \cdot \mathrm{d} \vec{A}$$
应有向量的,这里 RE显示的 bug
式中(后面一直用到)
$N$代表在$t$时刻该系统内所具有的某种物理量(如质量、动量等),
$\eta$代表单位质量流体所具有的这种物理量,$N=\iiint_{V} \eta \rho \mathrm{d}V$$ 。
推导(挺有意思)
对于恒定流动(定常流动)
$$\frac{\mathrm{d} N}{\mathrm{~d} t}=\iint_{C S} \eta \rho v_{n} \mathrm{~d} A$$
可见,定常流动时流体系统某种物理量的时间变化率只与通过控制面的流动有关,与控制体内的流动状态无关。
连续性方程
实质上是质量
积分形式的连续性方程
$$\frac{\partial}{\partial t} \iiint_{C V} \rho \mathrm{d} V+\iint_{C S} \rho v_{n} \mathrm{~d} A=0$$
推导

特殊形式
恒定流动(定常流动)
$$\iint_{C S} \rho v_{n} \mathrm{~d} A=0$$
即定常流动时经过控制面质量的净通量等于零
定常管流
如果截面上密度视为常数(密度是时间空间的函数),且取断面平均流速,
$$\rho_{1}v_{1a}A_{1}=\rho_{2}v_{2a}A_{2}$$
或$$\rho v A=常数$$
如果流体又是不可压缩的,即密度是常数
$$vA=Const$$
即不可压缩流体沿管流的体积流量是常量
对于同一根管子内的流动,管径粗的,截面上的平均流速低;管径细的,截面上的平均流速高
动量方程 动量矩方程
惯性坐标系中的动量方程和动量矩方程

$$\frac{\partial}{\partial t} \iiint_{C V} \rho \vec{v} \mathrm{~d} V+\iint_{C S} \rho v_{n} \vec{v} \mathrm{~d} A=\iiint_{C V} \rho \vec{f} \mathrm{~d} V+\iint_{C S} \vec{p}_{n} \mathrm{~d} A$$
注意推导过程
恒定流动(定常流动)
$$\iint_{C S} \rho v_{n} \vec{v} \mathrm{~d} A=\iiint_{C V} \rho \vec{f} \mathrm{~d} V+\iint_{C S} \vec{p}_{n} \mathrm{~d} A$$
即定常流动时,经过控制面流体动量的净通量矢量等于作用在控制体内流体上外力的矢量和,与控制体内的流动状态无关
定常管流的动量方程
$$\iint_{A_{2}} \vec{v}_{2} \rho v_{2} \mathrm{~d} A-\iint_{A_{1}} \vec{v}_{1} \rho v_{1} \mathrm{~d} A=\vec{F}_{f}+\vec{F}_{p_{n}}$$
一般讲,截面上的密度可近似地视为常量,但是必须考虑速度在截面上的变化。如果流经截面流体的动量值用按截面平均速度计算的动量值代替,则有
$$\iint_{A} \rho v^{2} \mathrm{~d} A=\beta \rho v_{a}^{2} A$$
式中$\beta称为动量修正系数$$$\beta=\frac{1}{A} \iint_{A}\left(\frac{v}{v_{a}}\right)^{2} \mathrm{~d} A$$
笛卡尔坐标的分量形式转换
$$\begin{array}{l}\rho q_{V}\left(\beta_{2} v_{2 a x}-\beta_{1} v_{1 a x}\right)=F_{f x}+F_{p_{n} x} \\\rho q_{V}\left(\beta_{2} v_{2 a y}-\beta_{1} v_{1 a y}\right)=F_{f y}+F_{p_{n} y} \\\rho q_{V}\left(\beta_{2} v_{2 a z}-\beta_{1} v_{1 a z}\right)=F_{f z}+F_{p_{n} z}\end{array}$$
假如有效截面上的密度与速度均为常量,$\beta=1$,化简为
$$\begin{array}{l}\rho q_{V}\left( v_{2 a x}-_{1} v_{1 a x}\right)=F_{f x}+F_{p_{n} x} \\\rho q_{V}\left( v_{2 a y}- v_{1 a y}\right)=F_{f y}+F_{p_{n} y} \\\rho q_{V}\left( v_{2 a z}- v_{1 a z}\right)=F_{f z}+F_{p_{n} z}\end{array}$$
考试注意
管流的动量方程常用于求解作用在管道上的动水反力等问题。(我们用的最多啊)
定常管流动量方程的计算,只涉及管道中两个截面的流动参数,与控制体内的流动状态无关。
因此,它可用于控制体内存在参数间断面的情况。
动量方程是一个矢量方程,应用它的投影方程比较方便。
使用时应注意适当地选择控制面,完整地表达出作用在控制体和控制面上的
要注意流动方向和投影的正负等
动量矩方程
动量矩方程就是比动量方程多一部分

恒定流动(定常流动)

旋转坐标系中的动量方程和动量矩方程

能量方程(与工程热力学好多类似之处)
积分形式的能量方程

重力作用下的定常绝热管流
$$\iint_{A_{2}} \rho v\left(u+\frac{v^{2}}{2}+g z+\frac{p}{\rho}\right) \mathrm{d} A-\iint_{A_{1}} \rho v\left(u+\frac{v^{2}}{2}+g z+\frac{p}{\rho}\right) \mathrm{d} A=0$$
伯努利方程及其应用
重力作用下不可压缩理想流体定常一维绝能流的能量方程
对于在重力作用下不可压缩理想的定常一维绝能流,由于没有损失,与外界又没有能量交换,流体的温度和热能不变。
方程公式
$$\frac{v_{2}^{2}}{2}+g z_{2}+\frac{p_{2}}{\rho_{2}}=\frac{v_{1}^{2}}{2}+g z_{1}+\frac{p_{1}}{\rho_{1}}$$
$$\frac{v^{2}}{2}+g z+\frac{p}{\rho}=\text { 常数 }$$
方程涵义
不可压缩理想
适用条件
只能应用于一条流线上的不同点
沿不同流线这个常数值通常是不相同的
另一种形式
$$\frac{v^{2}}{2 g}+z+\frac{p}{\rho g}=H$$
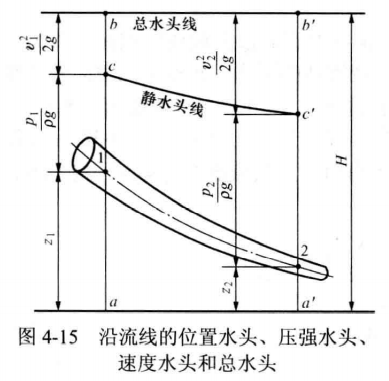
速度水头
单位质量流体的动能
涵义
不可压缩理想流体在重力场中作定常流动时,沿流线单位重量流体的速度水头、位置水头与压强水头之和等于常数:
总水头线为平行于基准线的水平线
在工程实际中的应用
伯努利方程与连续性方程推导出来的
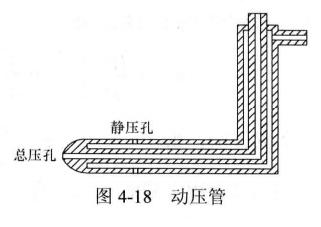
皮托管

$v_{B}=\sqrt{2 g h}$
文丘里管
$$q_{V}=C_{q} A_{2}\left[\frac{2\left(\rho^{\prime}-\rho\right) g h}{\rho}\right]^{1 / 2}\left(1-\frac{A_{2}^{2}}{A_{1}^{2}}\right)^{-1 / 2}$$
式中$C_q$为流量修正系数
做题目的注意
注意基准面的选取
两个大容器,就选择自由页面
大容器流出,取开口处
管道取中线
一般都要结合联系性方程
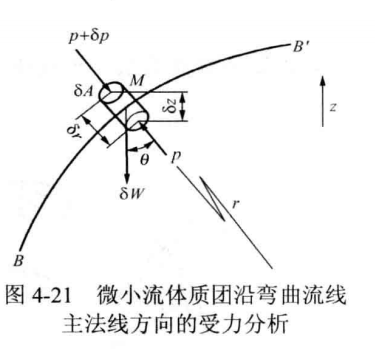
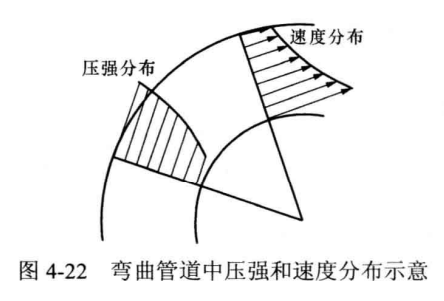
沿流线主法线方向压强和速度的变化
1. 流速变化
$$\frac{\partial v}{\partial r}+\frac{v}{r}=0$$
$$v=\frac{Const}{r}$$
式中:$Const$是沿径向的积分常数,一般来讲它是沿流线方向不同位置 $S$ 的函数。
山此可见,在弯曲流线主法线方向上,速度随距曲率中心距离的减小而增加,
所以在弯曲管道中,内侧的速度高,外侧的速度低
2. 压强变化(这里只考虑水平面内的流动)
$$\frac{1}{\rho} \frac{\partial p}{\partial r}=\frac{v^{2}}{r}$$
$$p=C_{1}-\rho \frac{C}{2 r^{2}}$$
式中:$C_{1}$是沿径向的积分常数。
由此可见,在弯曲流线主法线方向上压强随距曲率中心的距离的增加而增加,
所以在弯曲管道中的流动,
内侧的压强低,外侧的压强高
对于直线流动
直线流动时沿垂直于流线方向的压强分布服从于静力学基本方程式
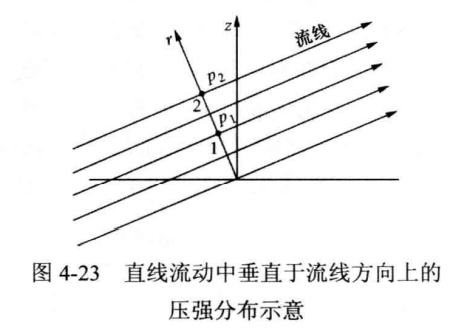
如果还不计重力
不计重力影响的直线流动,沿流线法向的梯度为零,即没有压强差
所以在直管管壁内测得的静压强也就是该截面上任意一点的静压强
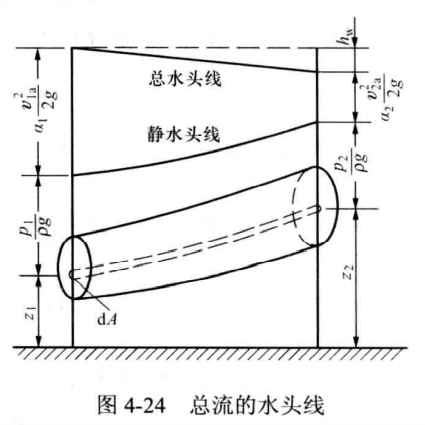
粘性流体总流总流的伯努利方程
公式
$$\frac{\alpha_{1} v_{1 a}^{2}}{2 g}+z_{1}+\frac{p_{1}}{\rho g}=\frac{\alpha_{2} v_{2 \mathrm{a}}^{2}}{2 g}+z_{2}+\frac{p_{2}}{\rho g}+h_{\mathrm{w}}$$
为总流的动能修正系数
$$\alpha=\frac{1}{A} \iint_{A}\left(\frac{v}{v_{\mathrm{a}}}\right)^{3} \mathrm{~d} A$$
为由截面至截面平均单位重量的能量损失。
这是因为对于不可压缩黏性流体的
使用条件
适用于该流动的任意二缓变流截面,不必顾及它们之间有无急变流存在。
水头线
为了克服黏性阻力,总流的机械能是逐渐减小的,总水头线是逐渐降低的
相似原理和量纲分析
引入
理性认识依赖于感性认识,流体力学理论的检验和发展依赖于流体力学试验。
结合工程需要的流体力学试验一般很难在实物(原型)上进行,而是利用有关试验装置(例如风洞、水洞、水池等)在按一定比例尺(一般为缩尺)制作的模型上进行。
如何选定制作模型的比例尺并保证经模型的流动与经原型的流动力学相似,又如何将模型试验结果推广应用到原型上去,这是模型试验前必须解决的问题。
即使有些试验可以在实物上进行,也有如何将在特定条件下得到的试验结果推广应用到同类相似流动中去的问题。
人们经过长期的科学试验,终于探索和总结出了指导模型试验的理论,即相似原理。
以相似原理为基础的模型试验方法在流体力学中有着广泛的应用。
例如,通过飞机模型在风洞中的试验去探索飞机的气动特性,通过舰船模型在试验池中的试验去研究舰船的阻力特性,通过推进器模型在水洞中的试验去研究推进器的动力特性,通过锅炉的水模型试验去研究炉内的气动特性,等等。
该方法不仅在流体力学中有着广 泛的应用,且也广泛地应用于传热、传质以及其他复杂物理化学过程内部规律的探索。
流体的力学相似
几何相似
涵义
几何相似是指模型与原型的全部对应线性长度的比例相等
两个运动相似的液流中,同一瞬时对应的流线应当相似,对恒定流动,对应流体质点的运动轨迹几何相似,且通过对应迹线的时间成同一比例
长度比例尺 $$k_l$$
基本比例尺
$$\frac{l^{\prime}}{l}=k_{l}$$
引申
面积比例尺
体积比例尺
运动相似
涵义
运动相似是指模型与原型的所有对应点上、对应时刻的流速而流速相等,即它们的
速度比例尺 $$k_v$$
基本比例尺
$$\frac{v^{\prime}}{v}=k_{v}$$
引申
时间比例尺
体积流量比例尺
运动粘度比例尺
角速度比例尺
动力相似
涵义
模型与原型的流场所有对应点作用在流体微团上的各种力彼此方向相同,而他们的大小比例相等
密度比例尺
基本比例尺
$$\frac{{\rho}^{\prime}}{\rho}=k_{\rho}$$
不选力比例尺作为基本比例尺的原因
影响力的因素太多
两个流场的密度比例尺常常是己知的或者是己经选定的
力比例尺
$$k_{F}=k_{\rho} k_{l}^{2} k_{v}^{2}$$
牛顿数$$Ne$$
$$\frac{k_{F}}{k_{\rho} k_{l}^{2} k_{v}^{2}}=1$$
$$\frac{F}{\rho l^2 v^2}=Ne$$
动力相似准则
重力相似准则
$$弗劳德~W.Froude~数$$
高教出版社说是质量力相似准则,也可能有惯性力,柯氏力等,这里就按照自己的教材来了
$$Fr$$
由来
$$k_{F}=\frac{W^{\prime}}{W}=\frac{\rho^{\prime} V^{\prime} g^{\prime}}{\rho V g}=k_{\rho} k_{l}^{3} k_{g}$$
代入
{{Embed src="uCv-syMnoIJ1A"}}
惯性力与重力的比值
比例尺
$$\frac{k_{v}}{\left(k_{l} k_{g}\right)^{1 / 2}}=1$$
$$\frac{v}{(g l)^{1 / 2}}=F r$$
粘滞力相似准则
$$雷诺~O.Reynolds~数$$
$$Re$$
由来
$$k_{F}=\frac{F_{\mu}^{\prime}}{F_{\mu}}=\frac{\mu^{\prime}\left(\mathrm{d} v_{x}^{\prime} / \mathrm{d} y^{\prime}\right) A^{\prime}}{\mu\left(\mathrm{d} v_{x} / \mathrm{d} y\right) A}=k_{\mu} k_{v} k_{t}$$
代入
{{Embed src="uCv-syMnoIJ1A"}}
惯性力与黏滞力的比值
比例尺
$$\frac{k_{\rho} k_{v} k_{l}}{k_{\mu}}=1, \frac{k_{v} k_{l}}{k_{\nu}}=1$$
$$\frac{\rho v l}{\mu}=\frac{v l}{\nu}=R e$$
压力相似准则
$$欧拉 ~L.Euler~ 数$$
$$Eu$$
由来
$$k_{F}=\frac{F_{p}^{\prime}}{F_{p}}=\frac{p^{\prime} A^{\prime}}{p A}=k_{p} k_{l}^{2}$$
带入
{{Embed src="uCv-syMnoIJ1A"}}
总压力与惯性力的比值
比例尺
$$\frac{k_{p}}{k_{\rho} k_{v}^{2}}=1$$
$$\frac{p}{\rho v^{2}}=E u$$
可用 $\Delta p$ 替代 $p$
非定常性相似准则
$斯特劳哈尔~V.Strouhal~数$
$Sr$
由来
$$k_{F}=\frac{F_{i t}^{\prime}}{F_{i t}}=\frac{\rho^{\prime} V^{\prime} \partial v_{x}^{\prime} / \partial t^{\prime}}{\rho V \partial v_{x} / \partial t}=k_{\rho} k_{l}^{3} k_{v} k_{t}^{-1}$$
带入
{{Embed src="uCv-syMnoIJ1A"}}
当地惯性力与迁移惯性力的比值
比例尺
$$\frac{k_{l}}{k_{v} k_{t}}=1$$
$$\frac{l}{v t}=S r$$
注意
对非恒定的周期运动,反映其周期性相似
对恒定流动,不必考虑$Sr$数
弹性力相似准则
$$柯西~B.A.L.Cauchy~数$$
$Ca$
由来
$$k_{F}=\frac{F_{e}^{\prime}}{F_{\mathrm{e}}}=\frac{\mathrm{d} p^{\prime} A^{\prime}}{\mathrm{d} p A}=\frac{K^{\prime} A^{\prime} \mathrm{d} V^{\prime} / V^{\prime}}{K A \mathrm{~d} V / V}=k_{K} k_{l}^{2}$$
$K$为体积模量
带入
{{Embed src="uCv-syMnoIJ1A"}}
惯性力与弹性力的比值
比例尺
$$\frac{k_{\rho} k_{v}^{2}}{k_{K}}=1$$
$$\frac{\rho v^{2}}{K}=C a$$
注意
对于气体,宜将柯西准则转换为马赫准则
预备知识
$$c^2=\frac{\partial p}{\partial \rho}$$
$$c^2=\frac{K}{\rho}$$
马赫数$Ma$
比例尺
$$\frac{k_v}{k_c}=1$$
$$\frac{v}{c}=Ma$$
表面张力相似准则
$韦伯~M.Weber~数$
$We$
由来
$$k_{F}=\frac{F_{\sigma}^{\prime}}{F_{\sigma}}=\frac{\sigma^{\prime} l^{\prime}}{\sigma l}=k_{\sigma} k_{l}$$
带入
{{Embed src="uCv-syMnoIJ1A"}}
惯性力与张力的比值
比例尺
$$\frac{k_{\rho} k_{l} k_{v}^{2}}{k_{\sigma}}=1$$
$$\frac{\rho v^{2} l}{\sigma}=W e$$
流动相似条件
同一类流动
单值条件相似
相似准则数相等
注意
定性量
单值条件中的各物理量,即决定性质的量
定性准则数
涵义
由定性量组成的相似准则数
包含
被决定量的相似准则数称为非定性准则数。
例如
在工程上常见的不可压缩黏性流体的定常流动中,密度特征长度/、流速黏度、重力加速度g等都是定性量,由它们组成的雷诺数、弗劳德数便是定性准则数:
压强与流速总是以一定的关系式互相联系着,知道了流速分布,便确定了压强分布,压强是被决定量,包含有压强(或压差)的欧拉数便是非定性准则数。
近似的模型实验
工程上常常采用近似的模型试验方法,即在设计模型和组织模型试验时,在与流动过程有关的定性准则中考虑那些对流动过程起主导作用的定性准则,而忽略那些对过程影响较小的定性准则,达到二流动的近似相似。
主要矛盾与次要矛盾
量纲分析方法
基本概念
量纲
物理量的性质和类别
$dim A =M^a L^b T^c$
几何
$a=0,b \neq 0,c=0$
运动
$a=0,c \neq 0$
动力
$a \neq 0$
单位
除表示物理量的性质外,还包括物理量的大小
$长度 [L]$
$质量 [M]$
$时间 [T]$
瑞利法
$\pi$定理 (泊金汉)
看书和例题,这个考试要考试
考试注意
考试只考$$\pi$$定理
一定要知道所有的物理量
出现无量纲,直接作为一个无量纲量
量纲一样,但物理量不一样,要注意
管内流动和水力计算 液体出流
导入
流体运动阻力与损失
研究总流伯努利方程中水头损失$h_w$
粘性损失
局部损失
流体运动的两种类型
沿程阻力
流体沿流动过程所受到的阻力
沿程阻力的影响使能头线倾斜
阻力来源
这种阻力来源于沿流程各流体微元或流体层之间以及流体与固体壁之间的摩擦力
与不同的流动状态相关
沿程损失
由沿程阻力所引起的
沿程损失沿流程均匀分布,其大小与流体的流程长度成正比
单位重力流体的沿程损失
$h_f$
$$h_{\mathrm{f}}=\lambda \frac{l}{d} \frac{v^{2}}{2 g}$$
达西-魏斯巴赫公式
单位体积流体的沿程损失
$\Delta p_f$
$\Delta p_f=\rho g h_f$
局部阻力
局部损失
由局部阻力所引起的
单位重力流体的局部损失
$h_j$
单位体积
$\Delta p_j$
$\Delta p_j=\rho g h_j$
总
$h_w=\sum h_f +\sum h_j$
粘性流体的两种运动状态
导入
在不同的边界条件下,粘性流体质点的运动会出现两种不同的运动状态
所有流体质点做定向有规则的运动
作无规则、不定向的混杂运动
这两种运动状态所受阻力不会相同
因此,在讨论能量损失的计算之前,必须对流动状态进行研究并加以区别
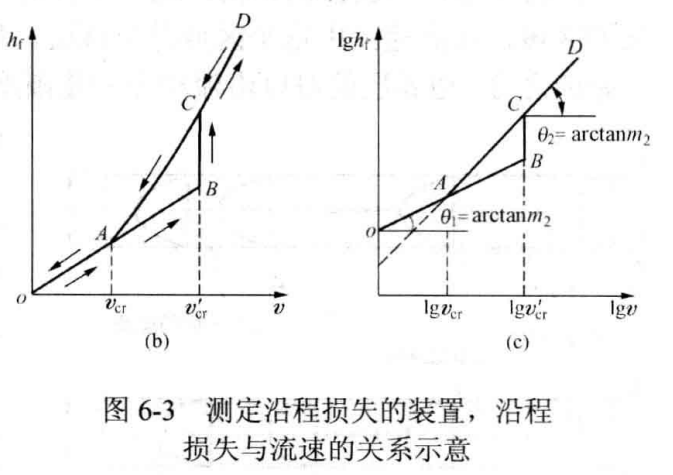
1. 雷诺实验
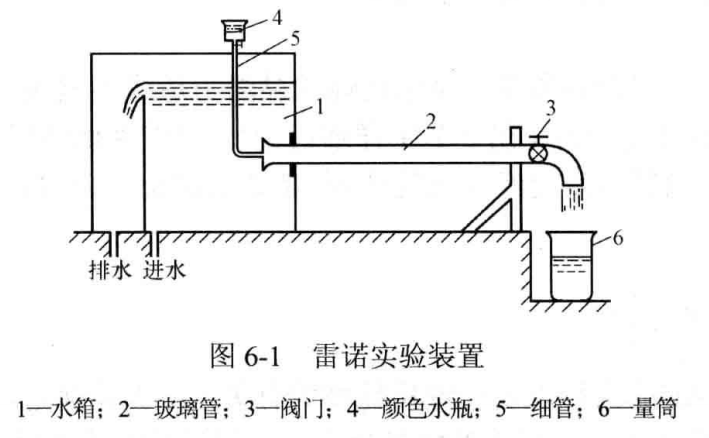
预备知识
层流 laminar flow
管中的流体质点无横向运动,只是沿着管轴线在各自流层中做各层间无相互混杂的直线流动
湍流或紊流 turbulent flow
管内流体质点完全处于无规则运动状态的流动
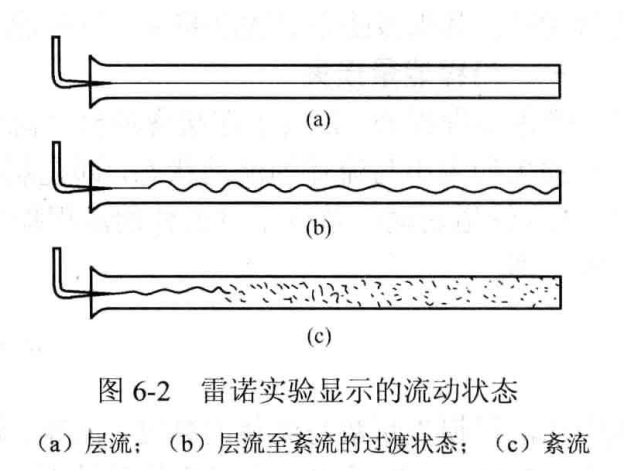
得出结论
层流 laminar flow
有序
粘性起主要作用,遵循牛顿内摩擦定律(牛顿切向应力公式)
能量损失与流速一次方成正比
$Re$较小时发生
湍流或紊流 turbulent flow
无序、随机、有旋……
受粘性和湍动的共同作用
水头损失与流速的 1.75~2 次方成正比
在$Re$较大时发生
2. 流态的判别
雷诺数是判别流动状态的唯一条件
上临界雷诺数
层流$$\rightarrow$$湍流
$$Re'$$
这时,即使小心实验,可以保持层流,只要稍有扰动,层流瞬即被破坏而转变为紊流。
因此,上临界雷诺数在工程上没有实用意义
下临界雷诺数
湍流$$\rightarrow$$层流
$$Re$$
通常将下临界雷诺数作为判别层流和紊流的准则数
$$Re<Re_{cr}$$ 层流
$$Re>Re'_{cr}$$ 湍流
$Re_{cr}<Re<Re'_{cr}$ 过渡区
工程上取 $Re_{cr}=2000$
有关雷诺数计算的补充
对于圆形截面
$$R e=\frac{\rho v d}{\mu}=\frac{v d}{v}$$
对于非圆形截面
当量直径
管道进口段粘性流动
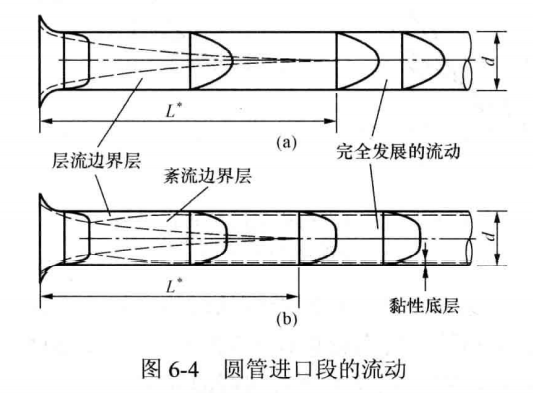
层流进口段长度
$$L^{*} \approx 0.058 d R e$$
当$$R e=2000$$时,$$L^* \approx 116 d$$
紊流进口段长度
$$L^{*}=(25 \sim 40) d$$
圆管中的层流运动层流 laminar flow
导入
层流运动是流体质点的一种简单的运动形式,作层流运动的流体内部摩擦切应力应严格遵从牛顿内摩擦定律
层流运动中速度分布、流量、损失等参数都可以从理论上用严密的数学方法推得,结果为准确的数学表达式
层流运动的研究有为紊流规律的探讨提供方向
书上用倾斜的进行推导
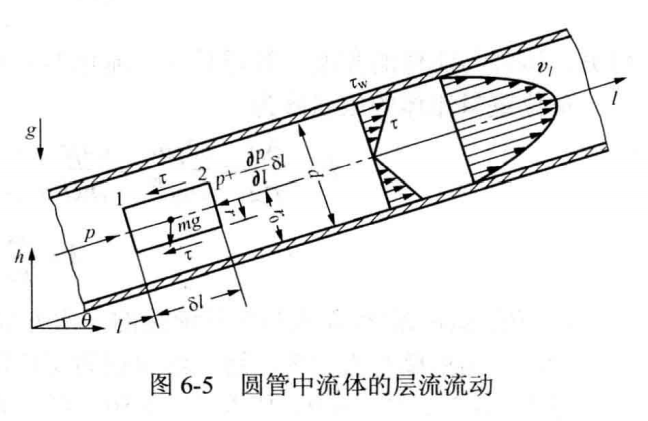
$$l$$处横截面上的切向应力分布
$$\tau=-\frac{r}{2} \frac{\mathrm{d}}{\mathrm{d} l}(p+\rho g h)$$
黏性流体在圆管中作层流流动时,流速的分布规律为旋转抛物面
$$v_{l}=-\frac{r_{0}^{2}-r^{2}}{4 \mu} \frac{\mathrm{d}}{\mathrm{d} l}(p+\rho g h)$$
最大流速
$$v_{l \max }=-\frac{r_{0}^{2}}{4 \mu} \frac{\mathrm{d}}{\mathrm{d} l}(p+\rho g h)$$
平均流速
$$v=\frac{1}{2} v_{l \max }=-\frac{r_{0}^{2}}{8 \mu} \frac{\mathrm{d}}{\mathrm{d} l}(p+\rho g h)$$
由于旋转抛物体的体积恰好等于它的外切圆柱体体积的一半,因此,平均流速等于最大流速的一半
圆管中流量
$$q_{V}=\int_{0}^{r_{0}} 2 \pi r v_{l} \mathrm{~d} r=\pi r_{0}^{2} v=-\frac{\pi r_{0}^{4}}{8 \mu} \frac{\mathrm{d}}{\mathrm{d} l}(p+\rho g h)$$
水平放置

$$q_{V}=\frac{\pi \mathrm{d}^{4} \Delta p}{128 \mu l}$$
哈根-泊肃叶公式
单位重量流体的压强降
$$\lambda \frac{l}{d} \frac{v^{2}}{2 g}$$
$$\lambda=\frac{64}{R e}$$
可见,层流流动的沿程损失与平均流速的一次方成正比,沿程损失系数旯仅与雷诺数Re有关,而与管道壁面粗糙与否无关
紊流都有关
动能修正系数
$$a=2$$
动量修正系数
$$\beta=\frac{4}{3}$$
粘性流体的紊流流动
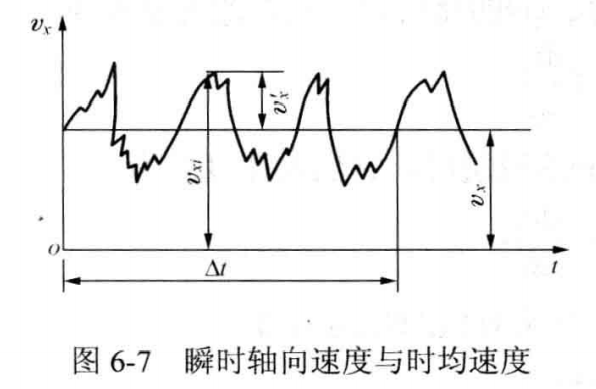
时均速度$$v_x$$
在时间间隔内轴向速度的平均值称为时均速度
脉动速度$$v_x'$$
瞬时速度与时均速度之差
对于一元紊流流动
紊流流动中压强也处于脉动状态
工程处理
在紊流流动中,流体的瞬时速度和瞬时压强都是随时变化的,如果通常用紊流的瞬时速度和瞬时压强去研究紊流运动,步骤极为繁复。
而且从工程应用的角度看,通常情况下也无此必要。
例如研究管道内的流体流动,关心的是流体主流的速度分布、压强分布以及能量损失等,而并不关心其中每个流体质点如何运动。
所谓流体主流的速度和压强,指的正是时均速度和时均压强,
而且普通测速管(例如动压管等)和普通测压计(例如压强表、液柱式测压计等)能够测量的也正是速度和压强的时间平均值。
所以,通常情况下都是用流动参数的时均值去描述和研究流休的紊流流动,这样便使问题大为
空间各点时均速度不随时间改变的紊流流动也简称为恒定流动(定常流动)定常流动,确切地讲是时均定常流动。
但是,对于紊流机理的研究和某些工程应用问题却必须考虑紊流中流体质点的复杂脉动运动。
紊流中的切向应力
组成
摩擦切向应力$$+$$紊流附加切向应力
$$\tau=\tau_{v}+\tau_{t}=\left(\mu+\mu_{t}\right) \frac{\mathrm{d} v_{x}}{\mathrm{~d} y}$$
推导
……(我不想看)
$$\tau_{t}=\rho l^{2}\left|\frac{\mathrm{d} v_{x}}{\mathrm{~d} y}\right| \frac{\mathrm{d} v_{x}}{\mathrm{~d} y}$$
$$\mu_t=\mu l^2\left|\frac{\mathrm{d} v_{x}}{\mathrm{~d} y}\right| $$
但与$$\mu$$与$$\mu_t$$不同,它不是流体的属性,它只决定于流体的密度、时均速度梯度和混合长度
紊流在过流断面上由三种情况
靠近边璧的层流区域
紊流中心部分
紊流中心区与边璧层流之间得过渡区
普朗特混合长度
$$\tau_{t}=\rho l^{2}\left|\frac{\mathrm{d} v_{x}}{\mathrm{~d} y}\right| \frac{\mathrm{d} v_{x}}{\mathrm{~d} y}$$ 这里面得 $$l$$ 就是
圆管中紊流的速度分布和沿程损失
圆管中紊流得区划
粘性底层 (近壁层流层)

靠近管壁处的薄层流体,受管壁影响,在流体粘性作用下流速急剧下降,在管壁处速度降为零
粘性底层的厚度取决于流体运动速度的大小
流速越高,其质点混杂的能力越强,粘性底层越薄;反之越厚
粘性底层厚度通常大约只有几分之一毫米
厚度与雷诺数有关
$$\delta=32.8 \frac{d}{Re \sqrt{\lambda}}$$
式中 $$d$$为管道直径 $$\lambda$$的沿程损失系数
尽管粘性底层的厚度很小,但对紊流流动的影响却很大,尤其在沿程损失计算中更为明显
紊流
紊流脉动动量交换,离边璧不远处到中心的绝大部分区域流速分布比较均匀,这部分流体处于紊流运动状态
过度部分(范围很小,不予考虑,通常并入紊流区域)
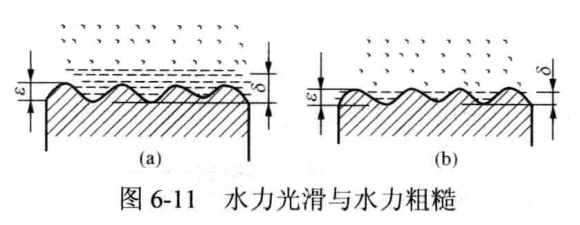
水力光滑管和粗糙管
绝对粗糙度
管壁表面粗糙凸出的平均高度叫作管壁的绝对粗糙度,记为$$\Delta$$
相对粗糙度
粗糙度$$\Delta$$与管径$$D$$的比值,记为
按$$\Delta$$与$$\delta$$的大小,将管道分为两种类型
水力光滑管
管壁的粗糙凸出部分完全淹没在粘性底层中
此时的粘性底层以外的紊流区域完全不受管壁粗糙度影响
流体就好像在理想的完全光滑管中流动
水力粗糙管
管内紊流的速度分布
待整理,我觉得不考
圆管中紊流的沿程损失
沿程损失因数为雷诺数$$Re$$和相对粗糙度$$\Delta$$的函数
沿程损失的实验研究
考试
会找图
尼古拉斯实验
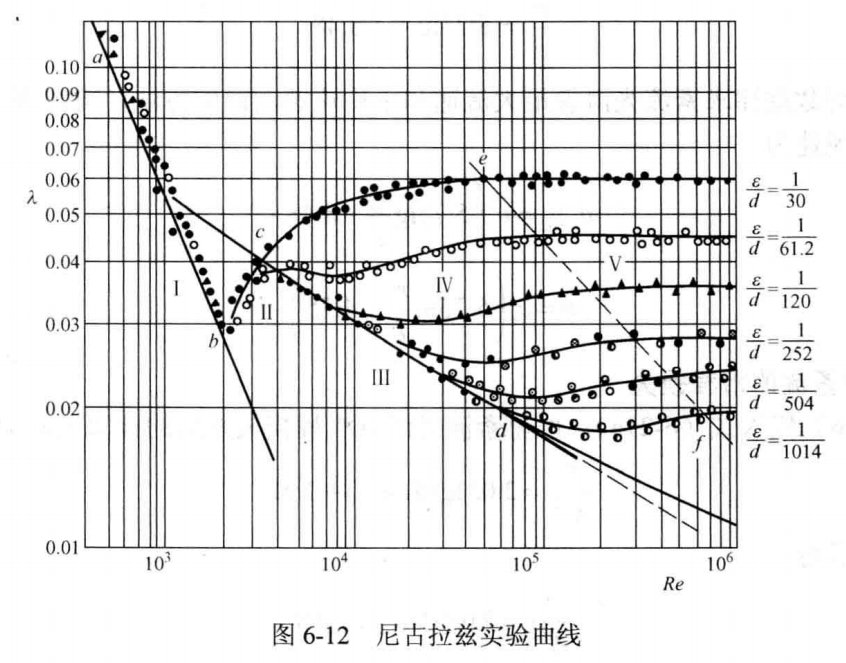
莫迪图
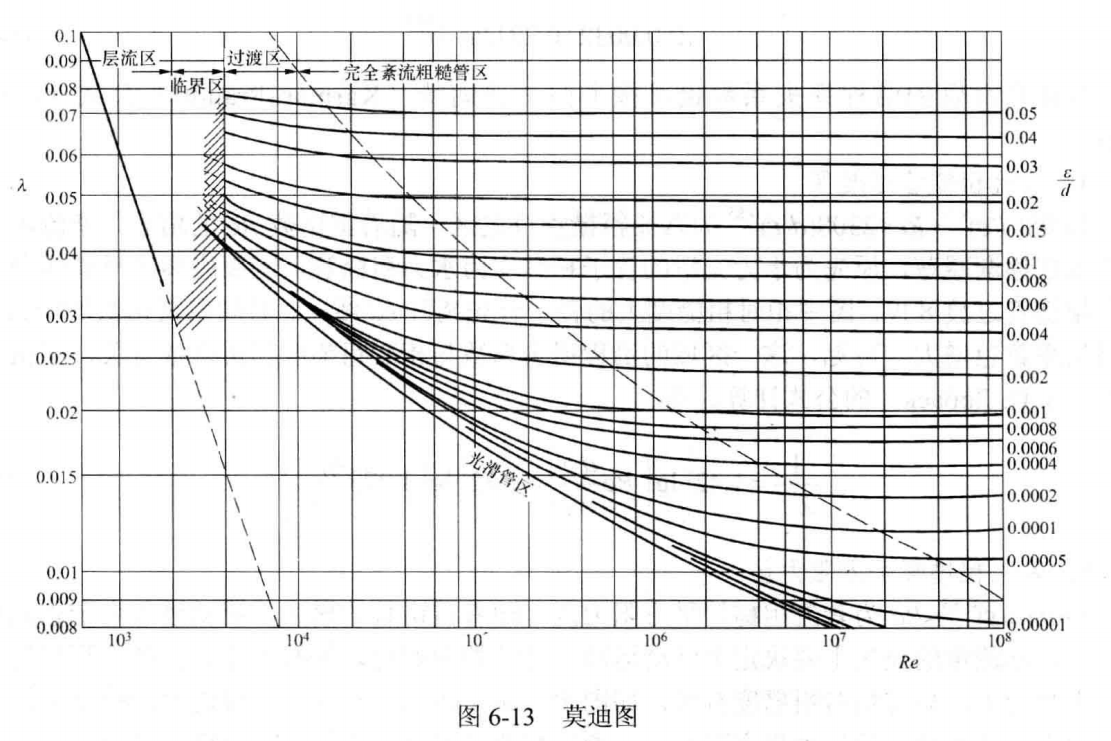
非圆形管道沿程损失计算
水力半径
当量直径
局部损失
1. 管道截面突然扩大
推导
……
波达公式
$$h_{\mathrm{j}}=\frac{1}{2 g}\left(v_{1}-v_{2}\right)^{2}=\frac{v_{1}^{2}}{2 g}\left(1-\frac{A_{1}}{A_{2}}\right)^{2}=\frac{v_{2}^{2}}{2 g}\left(\frac{A_{2}}{A_{1}}-1\right)^{2}$$
突扩(截面差距很大)
$$\zeta=1$$
突缩(截面差距很大)
$$\zeta=0.5$$
2. 管道界面突然缩小
3. 弯管
各类管流的水利计算
液体出流
水击现象
气体的一维流动
本章导入
在前几章中,除少数问题(例如水击)外,我们都假定流体是不可压缩的,把流体的密度视为常量。
这样,简化了许多流动问题的分析和计算。
如前所述,对于通常情况下的液体流动和流速不高、压强变化较小的气体流动,这样的简化是可行的。
但是,当气体流速较高时,气体的可压缩性将明显地影响着它的热力学和动力学特性;
不可压缩性假设将造成对实际情况一定程度的偏离,流速越高,这种偏离越大;
特别是超过声速的流动,其整个流场的流谱都与低于声速的流动不同。
这就是说,对于较高流速的气体流动,必须视密度为变量,按可压缩流体来研究
我们主要讨论气体一维定常流动的基本规律
考虑主要因素,忽略次要因素,找出规律。而后在此基础上再考虑次要因素,加以必要的修正。
这种方法也是进行科学研究探索未知世界的主要方法。
微弱压强波的一维传播
涵义及由来(微弱压强波是什么?怎么来的?)
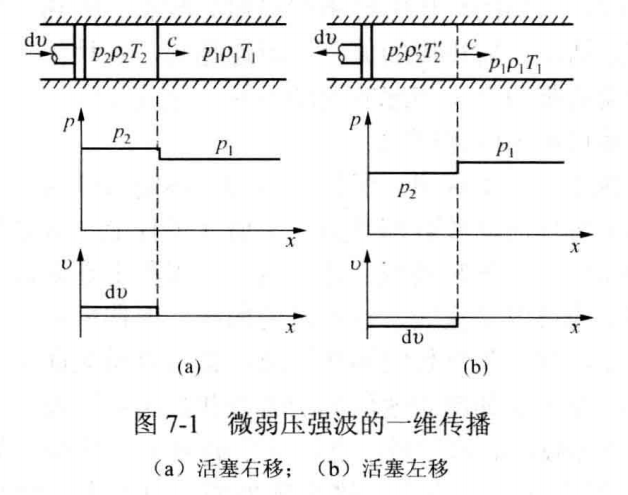
特点
由于经过微弱压强波,气流的压强、密度、温度和速度的变化都是无穷小量,而且传播过程进行得相当迅速,因而完全可以忽略黏性作用和传热,把微弱扰动的传播过程视为等熵过程。
声速
涵义
声速即传播的速度。
声音是由微弱压缩波和微弱膨胀波交替组成的,它的传播速度
所以声速可作为微弱压强波传播速度的统称。
同样由式(7-1)确定。
在气体流动中,流速低于声速的亚声速流动和流速高于声速的超声速流动便是以声速为准来划分的。
在气体动力学中声速是重要的气流参数。